|
³æ¤¸¤»¡BÃä½t°»´ú ³¯¼yÃv 2004-11-03 ±N¼v¹³¤Á³Î¦¨ª«¥ó©MI´º¬Oª«¥ó¿ëÃÑ©M¼v¹³²z¸Ñ«eªº°ò¥»¤u§@¡A³oÓ¤u§@¥Dnªº¥ô°È¬O§ä¥Xª«¥óªºÃä½t©M½u±ø¡C¹ï¤HÃþµøı¨t²Î(human visual system)¦Ó¨¥¡A³o¬O¤@¥ó»´¦Ó©öÁ|ªº¨Æ¡A¦ý¦b¹q¸£µøı¤¤¡AÁaµM¬O¬Û·í½ÆÂøªº²z½×©Mºtºâªk¡A³£¤£®e©ö¼Ò¥é¤HÃþªº³oӦ欰¯à¤O¡C¥Dnªº§xÃø¨Ó¦Û¥H¤U°ÝÃD¡G ¢w ì©l¼v¹³¶q¤Æªº»~®t©M·P´úªºÂø°T¡C¦¹¤@¦]¯À¾ÉP°»´ú«G«×ÅܤƦý¨Ã«Dª«¥óÃä½tªº°Ï°ì¡A¦P®É¥i¯àº|¥¢¤@¨Çª«¥óÃä½t¦ý¬O¨S¦³©úÅã«G«×Åܤƪº°Ï°ì¡F ¢w ª«¥óÃä½tªº¥¿½T¦ì¸m·|¨ü¨ì¶q¤Æ»~®t©MÂø°Tªº¼vÅT¦Ó²£¥Í°¾²¾¡F ¢w ª«¥óÃä½t¦b¼v¹³¤¤À³ªí²{¥X¾U§Qªº«G«×ÅܤơA³o´N¬O¥¦ªº°ªÀW¯S©Ê¡A©Ò¥H¥ô¦ó·Qn°§C¼v¹³Âø°Tªº¥·ÆÂoªi³£·|¾ÉPÃä½t°Ï°ì°T¸¹ªº½k¤Æ(bluring)¡F µ´¤j¦h¼ÆªºÃä½t°»´ú¤èªk³£¬O±Ä¥Î·L¤Àªºì²z¡A¦]¬°·L¤À·|©ñ¤j°ªÀW°T¸¹¡A¦ý¤]·|©ñ¤jÂø°T¡A¦]¦¹¥·ÆÂoªiÁ`¬O»Ýnªº¡C¥·ÆÂoªiªºµ{«×¬O®Ú¾ÚÂoªi¾¹ªº¤j¤p(size)©MÂoªiªº¤Ø«×(scale)¡A¶V¤jªº¤Ø«×¶V¯àªí²{¥X¤j½d³òªº«G«×ÅܤơA¦ý¤]¨Ï±o©Ò°»´ú¥X¨ÓªºÃä½t¦ì¸mºë½T«×¶V®t¡F¸û¤pªº¤Ø«×Áö¯à§ä¥X¸û¬°¥¿½Tªº¦ì¸m¡A¦ý¤S®e©ö²£¦h³\¦h¿ù»~ªºÃä½tÂI¡C¤£¦P¼v¹³ªº¤Ø«×¼vÅT¤]¤£¬Û¦P¡A·Qn§ä¥X¤@ӳ̨Ϊº¤Ø«×¾A¥Î¦b¤@±i¼v¹³ªº¥þ³¡Ãä½t¬O«Ü§xÃøªº¡A·Qn§ä¥X¤@ӳ̨Ϊº¤Ø«×¾A¥Î¦b©Ò¦³¼v¹³§ó¬O¤£¥i¯àªº¨Æ¡C ¦h¤Ø«×ªºÃä½t°»´ú(multiscale edge detection)¤èªk¦]¦¹´£¨Ñ¤@Ó¨ì¥Ø«e¬°¤î³Ì¦nªºÃä½t°»´ú¤èªk¡C³oºØ¤èªkªº®Ö¤ß·§©À¬OÀ³¥Î¤£¦P¤j¤pªº¥·ÆÂoªi¾¹(¨Ò¦p°ª´µÂoªi¾¹)»Pì©l¼v¹³§@°j±Û¿n¡A±o¨ì¤£¦PscaleªºÂoªi¼v¹³¡A¦A¹ï¨C¤@ÓscaleªºÂoªi¼v¹³©â¨ú¨äÃä½t¡A³Ì«áÅ|¦X©Ò¦³scaleªºÃä½t¸ê°T¬°³Ì²×ªºÃä½t¼v¹³¡C 1. Scale spaceÂoªi ¤Ø«×ªÅ¶¡Âoªi¬O±´°Q°T¸¹(¼v¹³)ÀH¤Ø«×ÅܤƪºÂoªi§Þ³N¡C Y¦³¤@ºû°T¸¹f(x)¥H1-D°ª´µÂoªi¾¹¶i¦æ°j±Û¿nÂoªi¡G
ÅܤÆs¡A°T¸¹f(x)¦b(x, s)¥±¤W§Î¦¨ªº¹Ï§ÎºÙ¬°scale--space image(¤Ø«×ªÅ¶¡¼v¹³) F(x, s)¡G F(x, s) = G(x, s)* f(x) ¹ï©ó¯S©ws0¡A¦±½uF(x, s0)ªº¤Ï¦±ÂI(inflection point)±Nº¡¨¬ ±N©Ò¦³¤Ï¦±ÂI³s½u¥i§@¬°¤@²Õ(x, s)®y¼Ð¤Wªº¦±½u¡A¦p¤U¹Ï¡Cs¶V¤pªº¤è¦Vªí¥Üscale¸û¤jªº¤Ï¦±ÂI¡C
°Ñ¦Ò·j´M¡GIEEE XploreÃöÁä¦r¡Gscale space
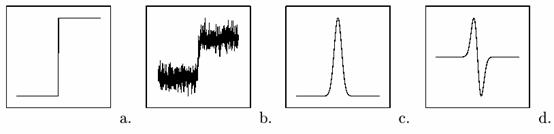
<and> edge 2. Ãä½t(Edge)ªº¯S©Ê
a. ¶¥ª¬Ãä½t屡Fb.
¥·Æ¶¥ª¬Ãä½tå±+white
noise(a signal with a flat frequency spectrum); c.¤@¶¥·L¤À屡Fd.¤G¶¥·L¤À屡F
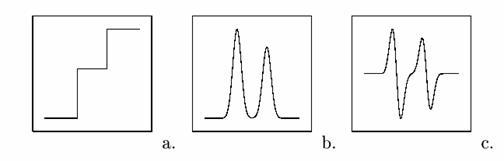
a. ¼Ó±èª¬Ãä½t屡Fb.¤@¶¥·L¤À屧e²{¨âÓmaximum©M¤@Óminimum¡Fd.¤G¶¥·L¤À屧e²{¤TÓzero-crossing¡F
Canny´£¥XEdge DetectionÂoªi¾¹ªºµû¦ô·Ç«h¡G 1. ¦b¥©Zªº¼v¹³°Ï°ì¨S¦³ÅTÀ³ => Âoªi¾¹«Y¼Æ©M¬°¹s: 2. µ¥¦V©Ê(Isotropy): Âoªi¾¹ÅTÀ³¥²¶·»Pedge¤è¦VµLÃö¡C 3. ¥¿½Tªºedge°»´ú¯à¤O: ÁקK¥H¤U±¡§Î ¢w±NÂø°T»~§P¬°edge¡A¦¹¬°false positive ¢w¥¼¯à§ä¥X¯u¥¿edge¡A¦¹¬°false negative 4. ¦nªº©w¦ì(localization): °»´úªºedge¦ì¸mÀ³¾¨¥i¯à±µªñ¯u¥¿edge¦ì¸m 5. ³æ¤@ÅTÀ³(single response): ¾¨¥i¯à´î¤Öedgeªþªñlocal maximaªº¼Æ¶q¡C CannyªºÃä½t°»´ú¾¹ì²z¡G 1. À³¥Î°ª´µÂoªi¾¹¦b¦Ç¶¥¼v¹³f(x,y)¡A±o¨ì¥·Æ¼v¹³g(x; y) = f(x; y) *
wG(x; y; £m) 2. À³¥Î·L¤ÀÂoªi¾¹¡¾g(x; y)pºâÃä½t±j«×(magnitude)©M¤è¦V(orientation). The scale
parameter £m is selected based on °ª´µÂoªi¾¹°Ñ¼Æ£m¨M©wÃä½t°»´ú¾¹ªº¤j¤p¡C¨M©w¾A·í£mÀ³¨Ì¤U¦C»Ý¨D¡G ¢w ·Qn±o¨ìedgeªº²Ó¸`µ{«×(fine edges vs
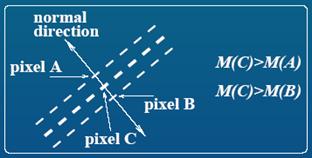
global edges); ¢w Âø°Tªº¦h¹è; ¢w °»´ú©Ê©w¦ì/·Ç½T«×trade off Canny´£¥X¨âÓ¤èªk¨Óº¡¨¬Ãä½t°»´ú¾¹³æ¤@ÅTÀ³©M©w¦ì¥¿½T©Êªºn¨D¡G ¢w Non-maxima suppression 1. ¹ï¨C¤@ÂIC(x; y), ¿ï©w««ª½©óorientation¤è¦V¨âÓ°¼Ã䪺¾FªñÂI¡A°O§@A©MB¡F. 2. ¦pªGM(A) > M(C) or
M(B) > M(C), «hC¤£¬°edge(³]©wM(C(x,y))=0); 3. ¿é¥X(edge)±j«×¼v¹³MNMS(x;
y)
non-maxima suppression¿é¥X¤´·|±a¦³¤@¨Ç«Dedgeªºlocal
maxima¡A¦P®É
connectivity©Ê½è¤£©úÅ㪺edge°Ï°ì¡CCannyªºHysteresis
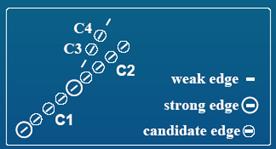
thresholding¤èªk´£¨Ñ¤F¸Ñ¨M¤è®×¡C ¢w Hysteresis thresholding 1. ©w¸q¨âÓthresholds, Thigh
and Tlow¡A ¹³¯À(x; y) ¦pªGMNMS (x; y) > Thigh¡A¸Ó¹³¯À´NºÙ¬°strong¡A ¹³¯À(x; y) ¦pªGMNMS (x; y)¡ØTlow¡A¸Ó¹³¯À´NºÙ¬°weak¡A ©Ò¦³¨ä¥Lªº¹³¯ÀºÙ¬°candidate¡F 2. ¦pªG¹³¯À(x; y)¬Oweak¡A«h²¤¥h¡F¦pªG¬Ostrong¡A«h¿é¥X¬°edge¹³¯À¡F 3. ¦pªG¹³¯À(x; y)¬Ocandidate¡A¦Ó¥BMNMS > Tlow¡A«h§PÂ_¬O§_ªuµÛlocal maxima¬Û³sªºedge¤è¦V¦³¬ï¹L(x,y)¡AY¬O¡A«h¿é¥X¬°edge¡F 4. ¦pªGcandidate¹³¯À(x; y)»P¤@strong¹³¯À¡A«h¿é¥X¸Ócandidate¬°edge¡C
CannyÃä½t°»´ú¾¹»Pscale space n
The correct scale for the operator depends on the
objects contained in the image. n
The solution to this unknown is to use multiple
scales and aggregate information from them. n
Different scale for the Canny detector is
represented by different standard deviations£mof the Gaussians. n
There may be several scales of operators that give
significant responses to edges (i.e., signal to noise ratio above the
threshold); in this case the operator with the smallest scale is chosen as it
gives the best localization of the edge. CannyÃä½t°»´úÂoªiºtºâªk¡G
3.
¦ô´ú¨C¤@¹³¯Àªº°Ï°ìÃä½tªº¥¿¥æ¤è¦Vn
4.
À³¥Înon-maximal suppression¤èªk§ä¥Xedges¦ì¸m¡F
Ãä½t°»´ú§@¬°¤@Ó³]p³Ì¨Î¤Æªº°ÝÃD¡A¨äµû¦ô¨ç¼Æ¬°¡G 1. Maximize the signal to noise ratio to give good
detection. This favours the marking of true positives. 2. Achieve good localization to accurately mark
edges. 3. Minimize the number of responses to a single
edge. This favours the identification of true negatives, that is, non-edges
are not marked. ¥»¶g²ßÃD¡G 1. ¨Ï¥ÎCannyÃä½t°»´ú¾¹¡A¿ï©w¤@²Õ¾A·íªº Thigh
and Tlow¡A¦A¤À§O¥Hs=0.5,
1.0, 2.0, 3.0¡A¨D±oant(gray)600x400¼v¹³4Óscaleªºedge¼v¹³¡A±N¨ä¦X¦¨¬°¤@±i³Ì²×ªºedge¼v¹³(¤£¤@©w¨Ï¥Î«Å|¬Û¥[(OR)ªº¤è¦¡)¡C 2. ¨ú¥Xì©l¼v¹³ªº¨ä¤¤¤@±ø¤ô¥profile¡A¨Ï¥Î¬Û¦Pµ{¦¡¡A¨D±o¦p²Ä¤@¸`©Ò³¯zªº¤Ø«×ªÅ¶¡¼v¹³¡C ½u°»´ú(Line Detection)°ÝÃD ½u«¬ºA(line pattern)¤£¦P©óÃä½t«¬ºA(edge pattern)ªº¯S¼x¡A¦b¼v¹³¤¤¡A½u«¬ºA¸g±`ªí²{¦b¤@¨Ç¼e«×«Ü¯¶ªºvalley/ridge¯¾¸ô¼Ë¦¡©Î¬O¤â¼g¤å¦r¡Bø¹Ï¼v¹³¤¤¡C¦pªG¥¦¨ã¦³¬YºØ¼e«×¡A«hÂǥѼзÇÃä½t°»´ú¤èªk±`·|§ä¥X¨â±ø¥¦æªº½u±ø¡A³o¬O¦]¬°¤j³¡¤ÀªºÃä½t°»´ú¤èªk³£«Ø¥ß¦b¶¥ª¬¨ç¼Æ(step
edge)ªº°ò¦¡C¤£¦P©óedgeÁ`¬O¦ì©ó¤G¶¥·L¤Àªºzero-crossing¦ì¸m¡Aline«h©ó¤@¶¥·L¤Àªºzero-crossingªº¦ì¸m¡C Steger´£¥X¨Ï¥ÎGaussian©M¤@¦¸·L¤ÀªºÂoªi¤èªk§@¬°½u°»´ú¾¹(cf. C.
Steger : An unbiased Detector of Curvilinear Structure, IEEE Transaction on
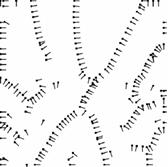
PAMI, 20(2), 1998); Ziou(Djemel Ziou : Optimal Line detection, 2000)«h±Ä¥ÎCannyªºÃä½t°»´úµû¦ô·Ç«h¡A´£¥X¥HIIRÂoªi¾¹¨Ó°»´ú½u¯S¼x¡C 3. ½Ð¨Ï¥Î²Ä¤³æ¤¸ªºRobinson¤@¶¥¾É¼ÆÂoªi¾¹¨D¥Xfinger300x300«ü¯¾¼v¹³ªºamplitude©Morientation¼v¹³¡A(A)§Q¥Îamplitude¼v¹³§ä¥Xzero-crossingªº¹³¯À«á¿é¥Xzero-crossing¼v¹³(¶Â¥Õ¼v¹³)¡C(B)§Q¥Îorientation¼v¹³¸ê°T¡Aµe¥X¨C¤@Ózero-crossing¦ì¸mªº¤è¦V¹Ï¦p¤U¹Ï(b)¡F
(a)
(b) (C)À³¥ÎCannyªºnon-maximal suppression©Mhysteresis
thresholding¤èªk§@¬°½u°»´ú«á³B²z¡A¿é¥X³Ì«áªºline image¡C |